

 联系我们
联系我们

库卡机器人使用KUKA EMD 零点校正实操
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
工博士提供了 KUKA,Yaskawa, ABB,Kawasaki和 FANUC等各种新型机器人 。我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线或致电与我们联系 。
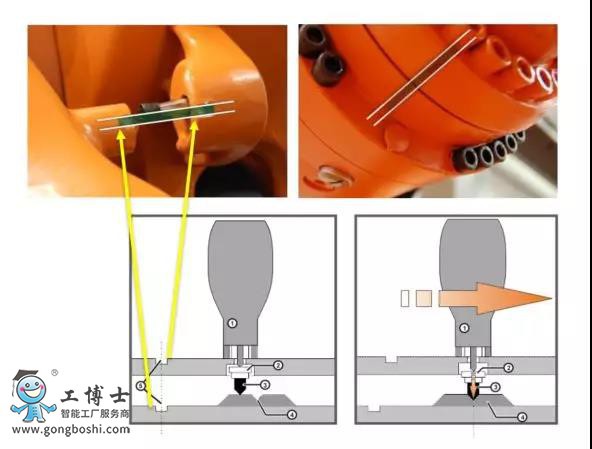
将机器人所有轴运行到“预校正”位置
 库卡机器人
库卡机器人
名词解释:预校正位
“预校正位”参考标识通常是凹槽或凹坑,且都涂有白色油漆。操作机器人,将标识对齐,即为预校正位置。
将 EMD 依次安装到相应轴的零点探头上
(注意:当 EMD 安装入探头后,不能手动操作移动该轴。否则将损坏探头。)


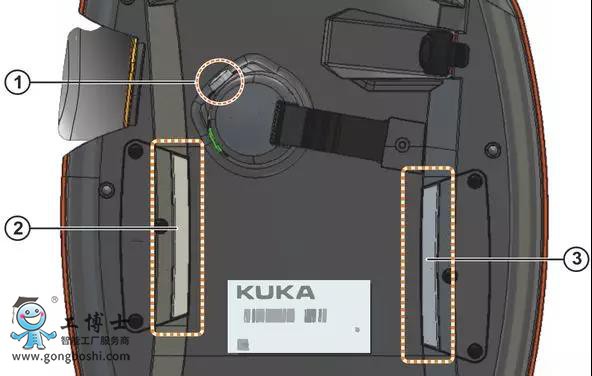
如上图,示教器背后有3个使能键。
再按住启动键并保持,机器人轴将慢速移动寻找零点标记槽。
完成后机器人将自动停机,届时再松开使能键以及启动键。
● 依次重复步骤2-7,完成每一个轴的零点校正。
以上是标准式(即单一负载规格)的 EMD 校正零点的方法。
名词解释:预校正位
“预校正位”参考标识通常是凹槽或凹坑,且都涂有白色油漆。操作机器人,将标识对齐,即为预校正位置。
将 EMD 依次安装到相应轴的零点探头上
(注意:当 EMD 安装入探头后,不能手动操作移动该轴。否则将损坏探头。)
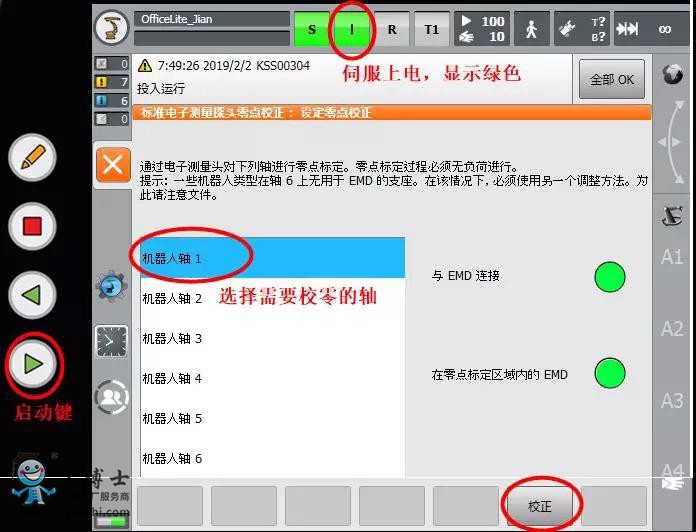
进入菜单“执行零点校正 ”
选择需要校零的轴,点击“校正”键。
稍等2秒后按住使能键并保持,使伺服上电。
再按住启动键并保持,机器人轴将慢速移动寻找零点标记槽。
完成后机器人将自动停机,届时再松开使能键以及启动键。
● 依次重复步骤2-7,完成每一个轴的零点校正。
以上是标准式(即单一负载规格)的 EMD 校正零点的方法。
- 下一篇:KUKA桁架机器人操作注意事项
- 上一篇:如何检查和维护减速器